
MonkeyBot
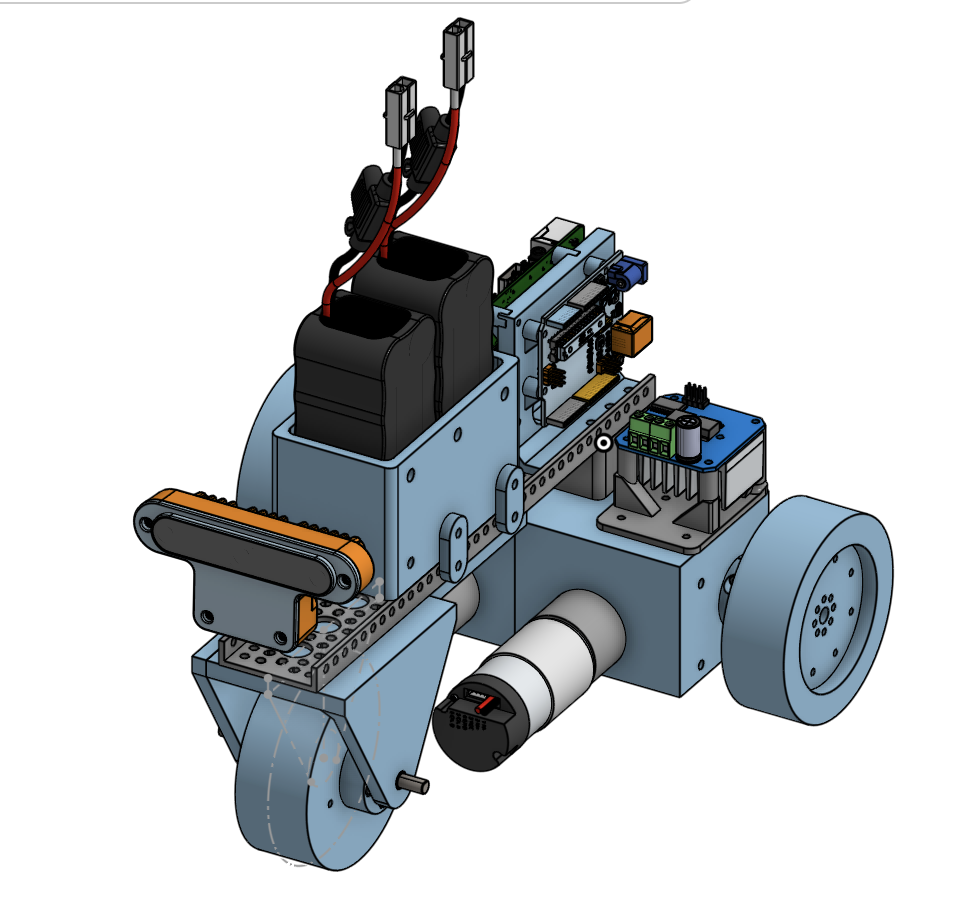
CAD for monkeybot
MonkeyBot is a custom-designed robot system by our mentor Colin Szeto, built using a Raspberry Pi, an Arduino, and a camera to control movement. The Raspberry Pi runs Python code and processes sensor input, while the Arduino handles motor control. Together, they allow MonkeyBot to respond to input, run programmed behaviors, and interact with its environment. The system supports both computer vision tasks, such as color detection and object tracking, and controller-based operation, helping build a strong foundation in robotics systems and control.
Here is one of our RoboBoat team members (Ria Sahapur’s) personal experiences building a moneybot:
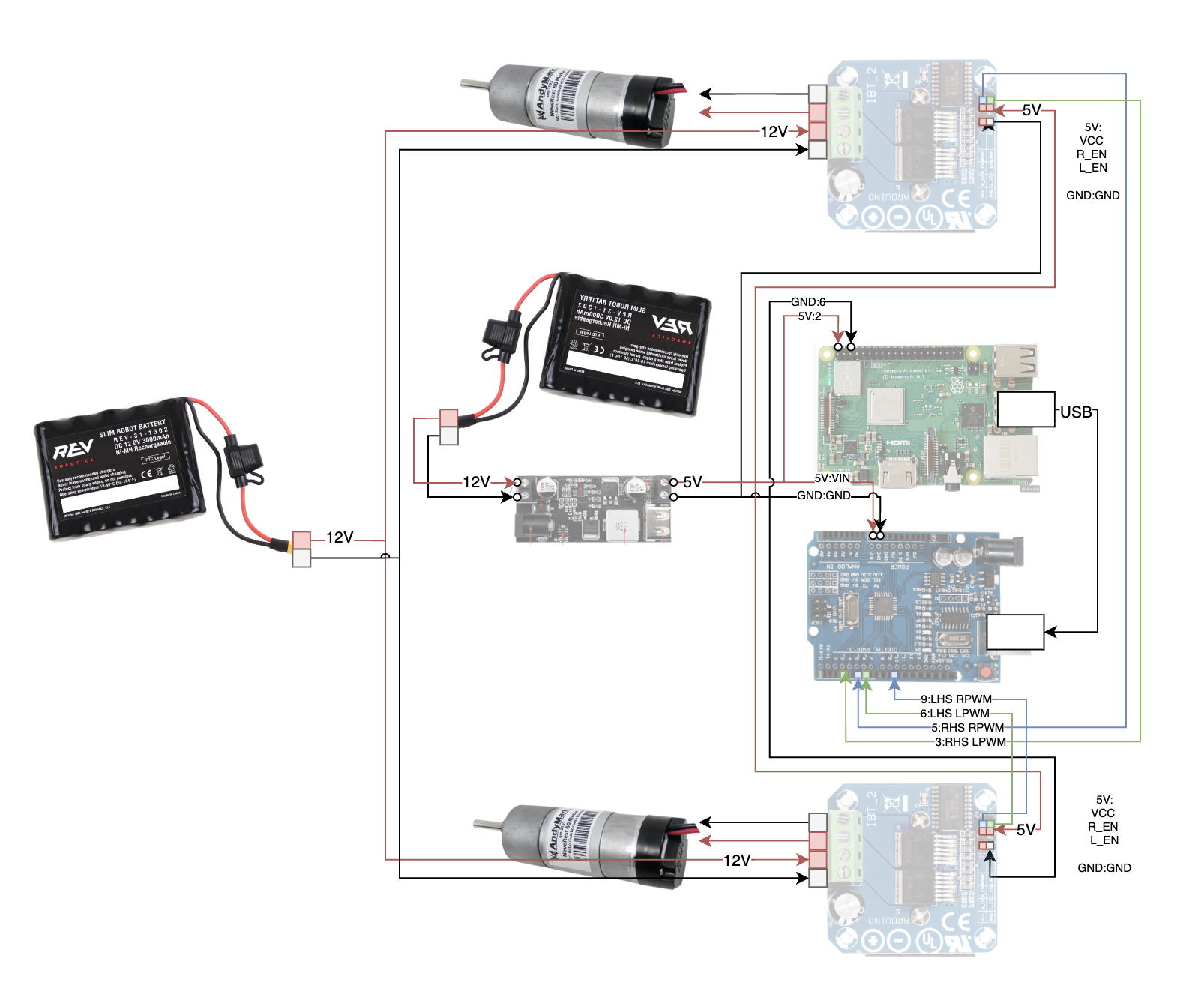
Electrical diagram of monkey bot
“Working with MonkeyBot helped me understand how a robotics system is set up and controlled from start to finish. I learned how to configure a Raspberry Pi, connect it to Wi-Fi, and use SSH to run code from my laptop, as well as how to connect an Arduino and a game controller. I also worked with the vision system, learning how to detect colors using HSV, track objects, and convert visual input into real-time steering decisions. Through this process, I gained experience debugging issues, following setup steps carefully, and solving problems when things didn’t work as expected. Overall, MonkeyBot helped me build a strong foundation in robotics and better understand how feedback and decision-making work in autonomous systems.”
Here is a document more in depth about what the monkey bot is about: