
Teensy Integration
We upgraded our microcontroller from an Arduino to a Teensy 4.1 to improve the control loop speed for our thrusters. The Teensy manages the thrusters and position estimation by fusing the GPS and Inertial Measurement Unit (IMU) data. Our redesign allows the embedded computer, the Jetson Orin Nano, to focus on high-level control, mission logic, and decision-making.
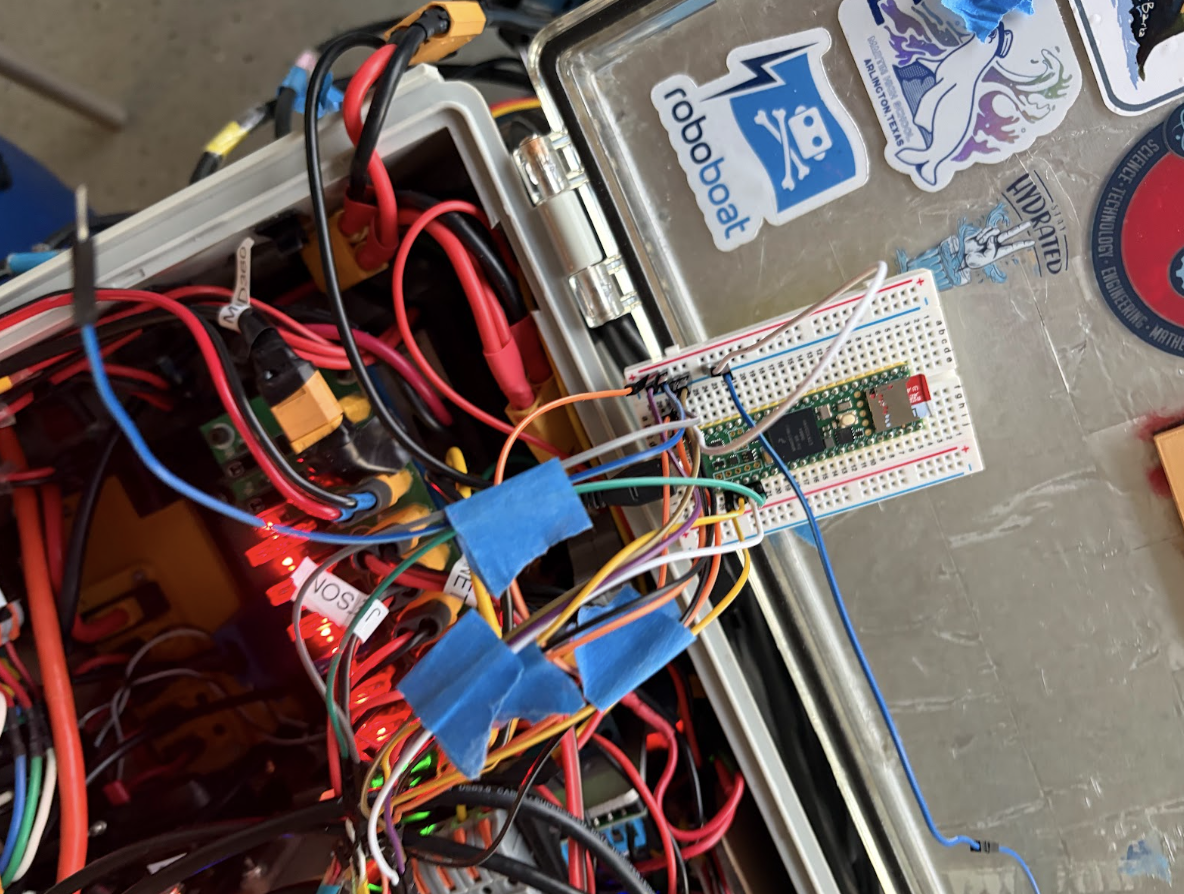
Teensy wiring in electrical box
Image of finished teensy 4.1 breakout board
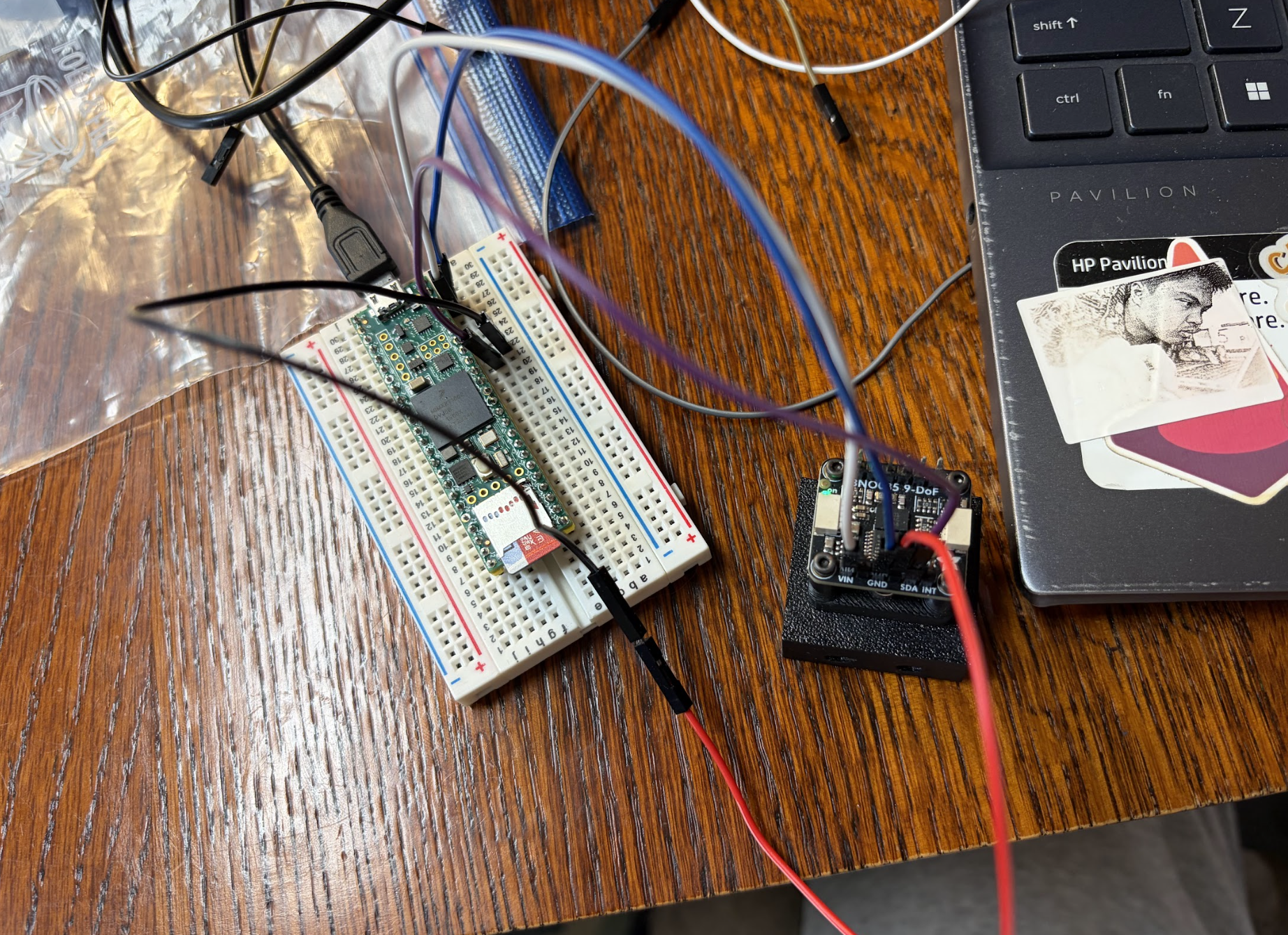
Physical setup of Teensy 4.1
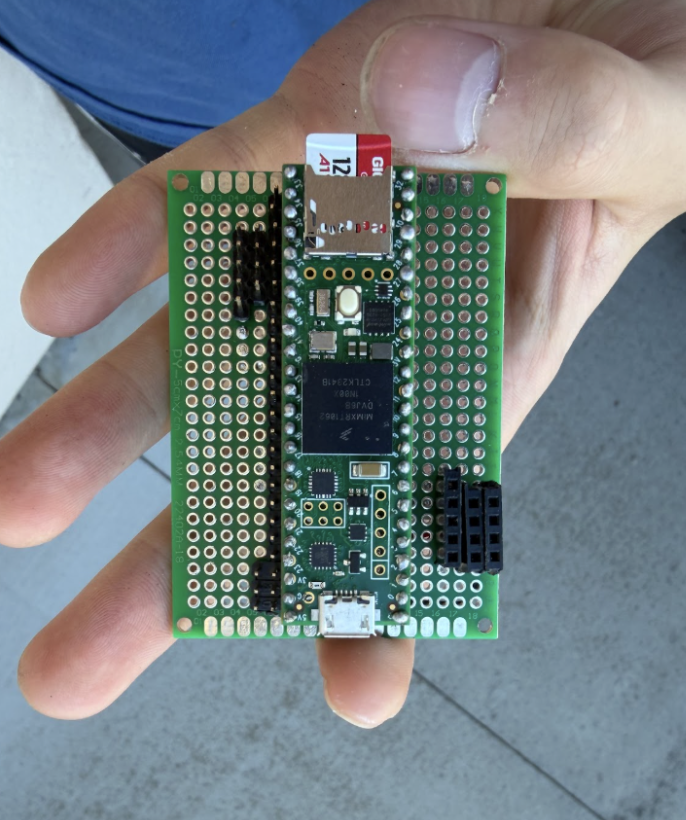
Image of finished teensy 4.1 breakout board