Overview
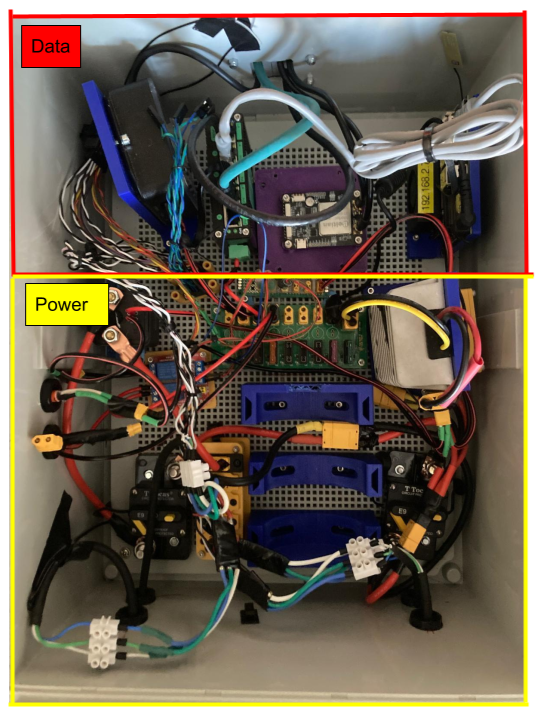
The electrical system is divided into two main parts, with each part housed in a separate section of the electrical box. The system is divided based on the interference caused by the electronic speed controllers, the high current carrying wires on the computational devices, and the magnetometer housed in the GPS module. These are located as far away from one another as possible.
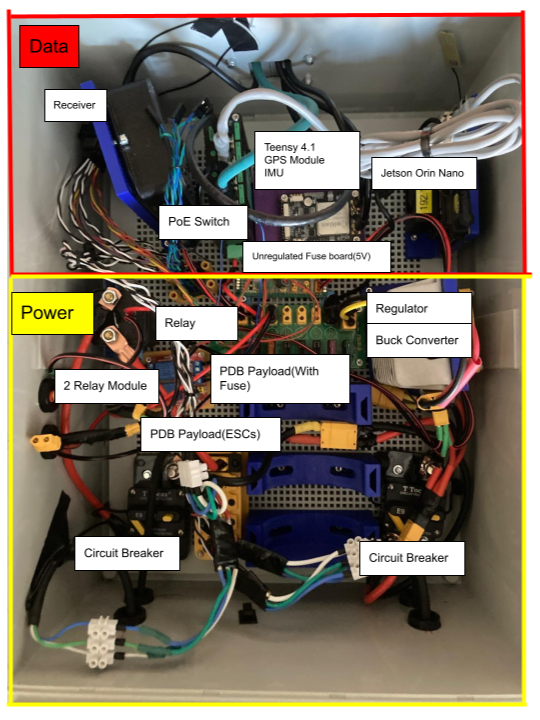
The power delivery section houses the battery, power distribution board, 12 Volts and 5 Volts linear regulators, electronic speed controller and the on/off switch.
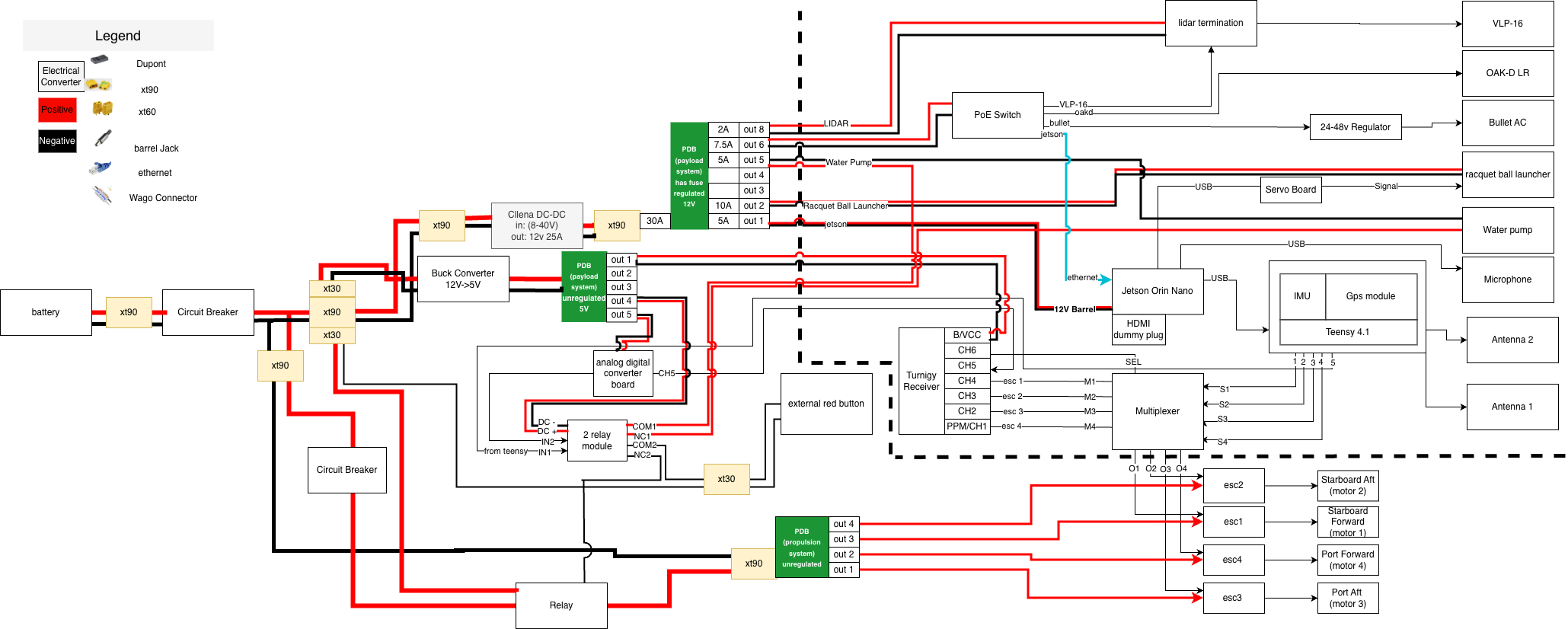
Barco Polo Electrical Diagram
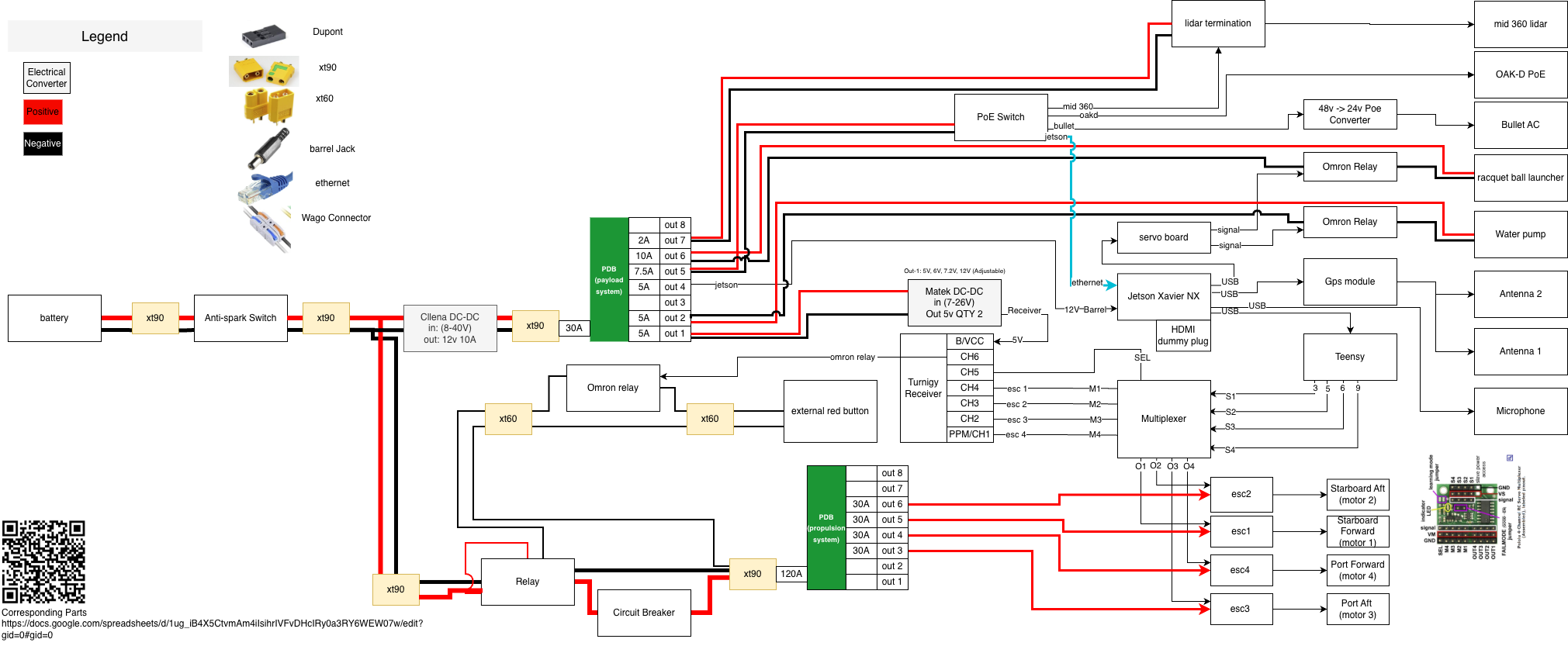
Crusader Electrical Diagram
Battery: 4 cell (14.8 Volts) Li-ion battery to power the boat
Power Distribution Boards (PDB): The power distribution boards implement circuit breakers in the form of fuses for each component and keep the electronics safe in case of a failure of one of the parts or a short circuit. One PDB powers the thrusters, while the other powers the rest of the components. This allows the kill switch to cut off power to the thrusters without impacting the rest of the components.
Linear Regulators: Some of the electronics (RC receiver and PoE injector) have a working voltage range of either 12V or 5V and cannot be connected directly to the power delivery board which outputs the battery voltage.
Thruster Controller: We are using a Teensy 4.1 that takes commands from the Jetson Orin Nano computer and provides instructions to the ESCs in the form of Pulse Width Modulation (PWM) signals.
Electronic Speed Controller (ESC): The ESCs take command from either the Arduino or the RC receiver through a multiplexor in the form of PWM signals and spin the thrusters.
Servo Board: The HUAREW servo driver board utilizes the I2C protocol to send PWMs to motors associated with the racquetball launcher and the water pump.
On/Off Switch: The switch is a failsafe mechanism that disconnects the battery and power distribution board in case of an emergency.
Computation and Controls: The electronics box is divided into two sections, which separate the battery, linear regulator, and PDB from the Arduino, PoE injector, multiplexor, RC receiver, and Nvidia Jetson Orin Nano computer.
2-Channel 5 V relay Module: that allows a microcontroller to safely switch higher-power loads such as motors or pumps. The optocouplers electrically isolate the control and load sides, improving noise immunity and protecting sensitive electronics
Crusader Electrical Layout

Barco Polo Electronics Layout

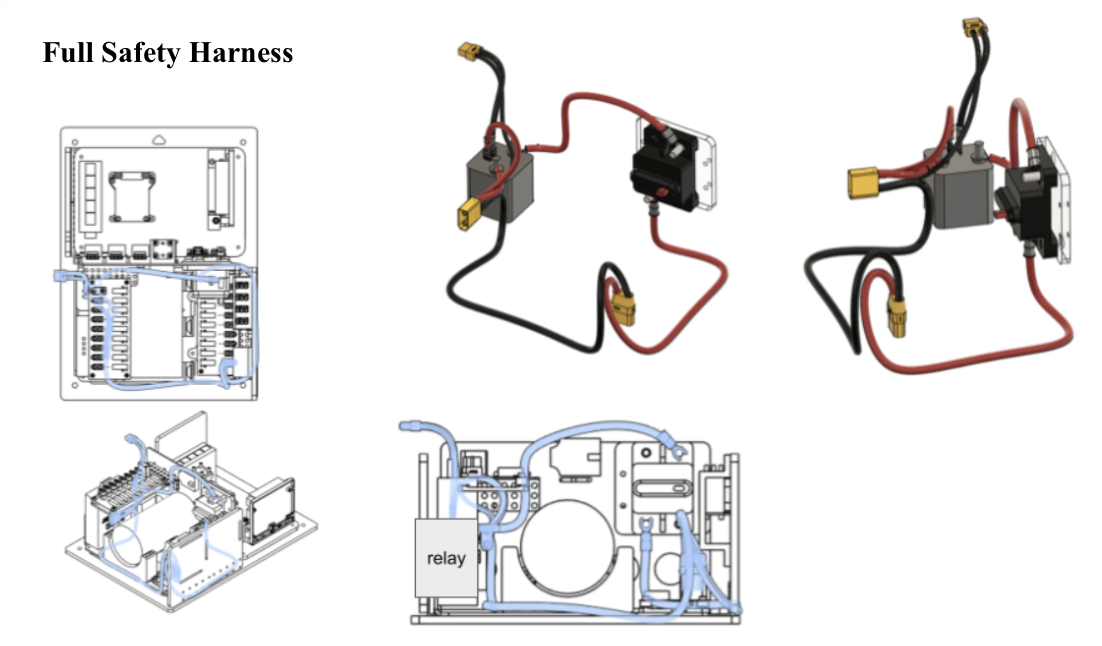
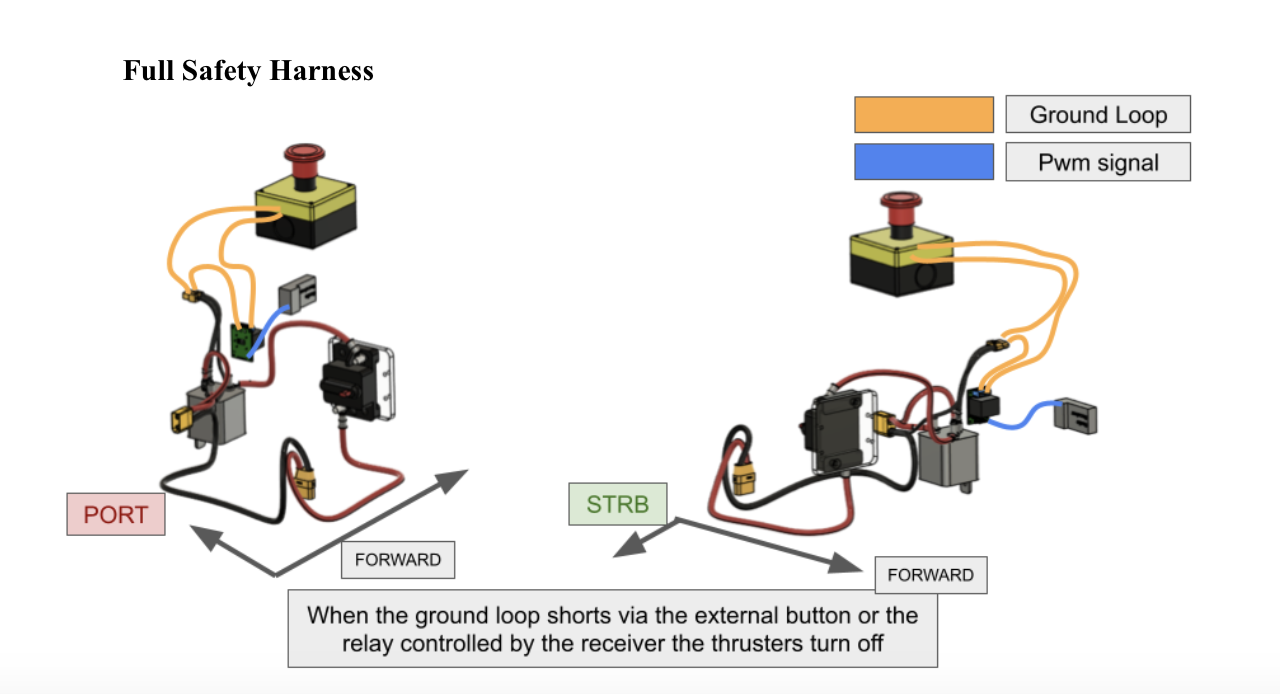
Safety System
The safety system comprises an onboard external button, in addition to a remote kill system that utilizes a relay activated by a channel from the receiver. The remote kill system will activate when Barco Polo or Crusader loses connection to the transmitter or in the event of a transmitter power loss.
Sensors
Adafruit BNO085 Inertial Measurement Unit (IMU): Measures motion from wind and waves on the lake. This aids in station keeping.
OAK-D Long Range PoE camera: Provides perception within 30 meters. The stereoscopic capabilities obtain the distance of any detected objects from Barco Polo. This, in conjunction with the GPS, allows for utilizing Simultaneous Localization and Mapping (SLAM) in our competition strategy.
Beitan Differential Global Positioning System (GPS): This allows the ASVs to keep track of its position and heading throughout the course, helping with localization.
MID-360: A compact sensor that uses rotating laser beams to create a full 360-degree 3D map of its surroundings by measuring distances to objects in all directions.
Adafruit I2S MEMS Microphone: is a low-power, omnidirectional digital MEMS microphone module that outputs high-quality 24-bit audio over I2S, making it ideal for ESP32 and other microcontrollers in voice and audio-sensing projects.