
RoboBoat 2026
With our second-generation team taking lessons from prior seasons’ RoboBoat, RoboSub, and RobotX, we aim to push our performance to new heights at Nathan Benderson Park in Sarasota, Florida from February 19 to 24. This is our third RoboBoat competition, with two Autonomous Surface vehicles (ASV), Barco Polo and Crusader.
Competition Strategy
Team Inspiration’s RoboBoat team consists of ten main team members and four supporting members, with team members ranging from middle/high schools in San Diego, California, and Florida, the Mesa College Impactship program, San Diego State University (SDSU), and collaborating with UCSD MAE15B and CSE 145/237. Due to the new inter-vehicle communications mission this year, we decided to build a new boat, Crusader, using a process similar to that of Barco Polo, to allow more time to implement and test software improvements.
For the RoboBoat 2026 competition, we will focus on building a more robust, mission-capable autonomous system that can reliably complete all competition tasks. The team’s strategy highlights consistent localization, adaptable navigation, and modular mission execution. The vehicle architecture is built upon past lessons from prior competitions, combining perception capabilities with global positioning data to maintain situational awareness throughout the course. Mission completion is structured to ensure the foundational navigation task is completed early before attempting other objectives. The team has introduced enhancements to both hardware and software subsystems, which include a new payload mechanism for object interaction and a restructured autonomy framework designed to support mission execution while maintaining operational safety and system stability.
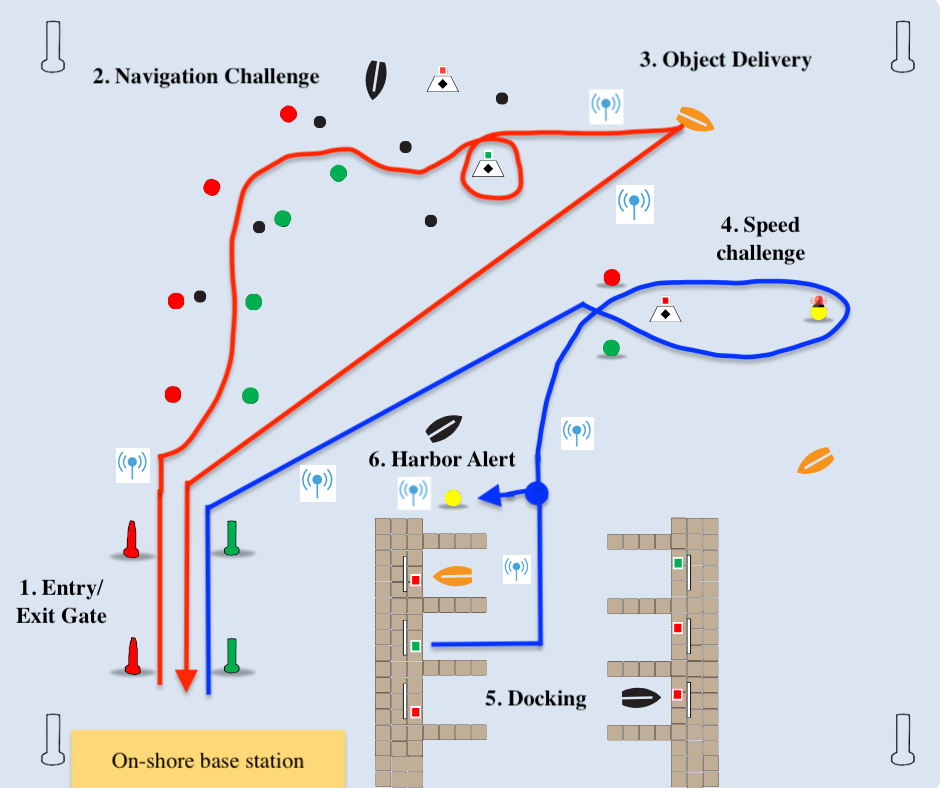
Barco Polo’s path for tasks 1-3 (red trajectory), Crusader's path for tasks 1, 4-6 (blue trajectory). Inter-Vehicle communication (antenna symbol).
Barco Polo
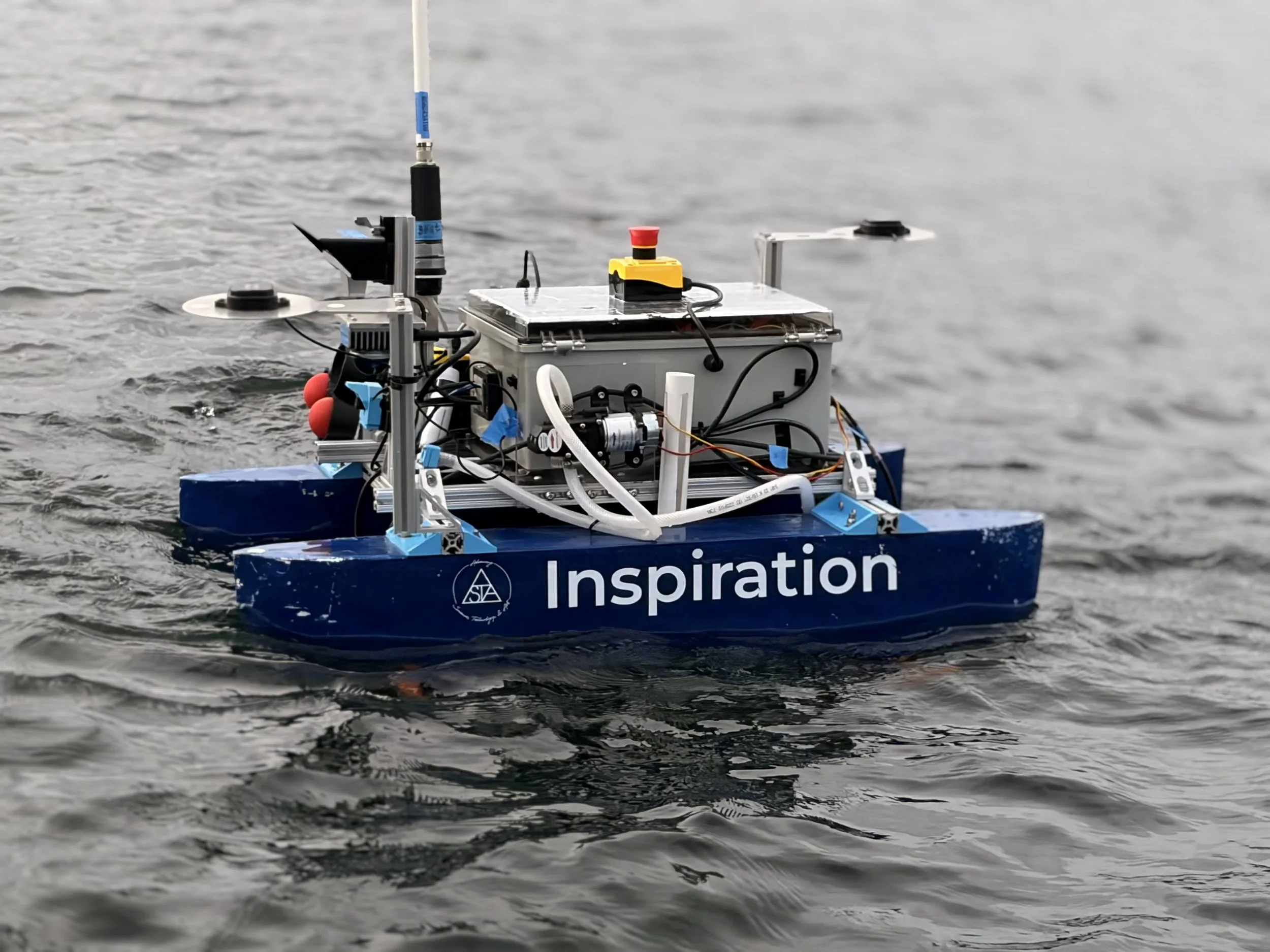
Manufactured in 2024, Barco Polo serves as our very first Catamaran designed Autonomous Surface Vehicle (ASV).
Weight
27 kg/ 59 lbs
Degrees of Freedom
3 (Surge, Sway, Yaw)
Power System
14.8V, 15.6Ah Li-Ion battery (x1)
Perception Sensors
Oak–D LR camera for stereo vision and object detection (x1)
Wireless Communications
5.8GHz Ubiquiti Bullet AC IP67 (x2)
915 Mhz Telemetry
WiFi
RC 2.4GHz ELRS
Dimensions
1 m x 0.6 m x 0.9 m
Endurance
Full Throttle – estimated 20 min runtime
Normal Usage – estimated 45 min runtime
Main Processor
Nvidia Jetson Xavier NX
Propulsion System
T200 thrusters (x4) (Holonomic layout)
Navigation System
Centimeter Precision GPS RTK
Dual Antenna GPS Heading
Adafruit BNO085 IMU
INMP441 MEMS Microphone Module
Software Architecture
Linux-based (Ubuntu 22.04)
Python, ROS 2, Bash
Payload
Water Pump
Racquet Ball Launcher
Crusader

Manufactured in 2025 using a design similar to Barco Polo, Crusader is our second Autonomous Surface Vehicle (ASV).
Weight
24 kg/ 54 lbs
Degrees of Freedom
3 (Surge, Sway, Yaw)
Power System
14.8V, 15.6Ah Li-Ion battery (x1)
Perception Sensors
Oak–D LR camera for stereo vision and object detection (x1)
Wireless Communications
5.8GHz Ubiquiti Bullet AC IP67 (x2)
915 Mhz Telemetry
WiFi
RC 2.4GHz ELRS
Dimensions
1 m x 0.6 m x 0.4 m
Endurance
Full Throttle – estimated 20 min runtime
Normal Usage – estimated 45 min runtime
Main Processor
Nvidia Jetson Orin Nano
Propulsion System
T200 thrusters (x4) (Holonomic layout)
Navigation System
Centimeter Precision GPS RTK
Dual Dish Antenna GPS
Adafruit BNO085 IMU
INMP441 MEMS Microphone Module
Software Architecture
Linux-based (Ubuntu 22.04)
Python, ROS 2, Bash
Payload
Water Pump
Racquet Ball Launcher